








































![CCTV-17農業農村 | [中(zhōng)國(guó)三農報道]中(zhōng)國(guó)科(kē)學(xué)院植被病蟲害遙感監測與預測系統升級版發布](static/picture/630c32e37f65b.png)



































近兩年,得益于自動駕駛對激光雷達傳感器量産(chǎn)和低價的巨大需求,激光雷達掃描頭的價格從十萬元級降至千元級,打破了激光雷達專業門檻高,應用(yòng)成本高的局面,國(guó)内外各硬件制造商(shāng)紛紛借機推出輕小(xiǎo)型低成本激光雷達掃描儀。本文(wén)意在探索輕掃式激光雷達掃描儀在快速獲取林木(mù)三維空間結構及林下地形的詳細信息,進而準确的提取單木(mù)參數中(zhōng)的實際應用(yòng)。
我們選取了北京市遠(yuǎn)郊區(qū)縣山(shān)區(qū)造林地進行了實際測試,采用(yòng)人工(gōng)測量、泰來興業公(gōng)司法如架站式地基激光雷達系統、四維遠(yuǎn)見公(gōng)司輕掃式激光雷達系統三種手段采集林木(mù)信息,并采用(yòng)國(guó)産(chǎn)自主的“銀河點點通”激光雷達數據處理(lǐ)軟件對單木(mù)進行識别,獲取樹木(mù)位置、株數、樹高和胸徑等信息。
本篇文(wén)章針對架站式地基激光雷達獲取和處理(lǐ)流程進行探索。
設備情況

作(zuò)業流程
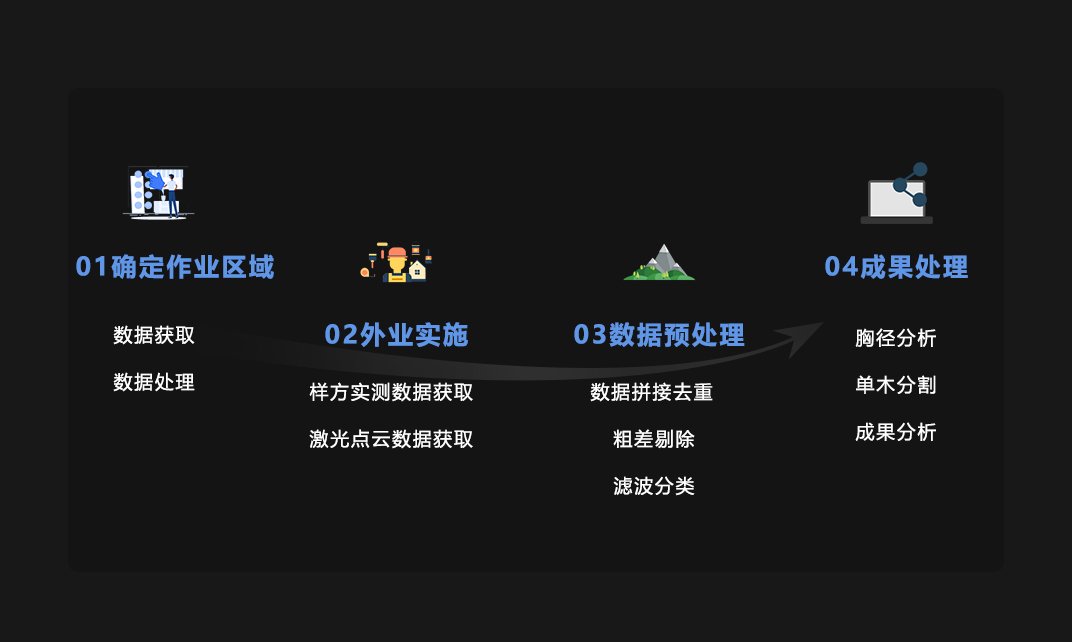
作(zuò)業确定區(qū)域

樣方實測數據獲取

激光點雲數據獲取


内業處理(lǐ)
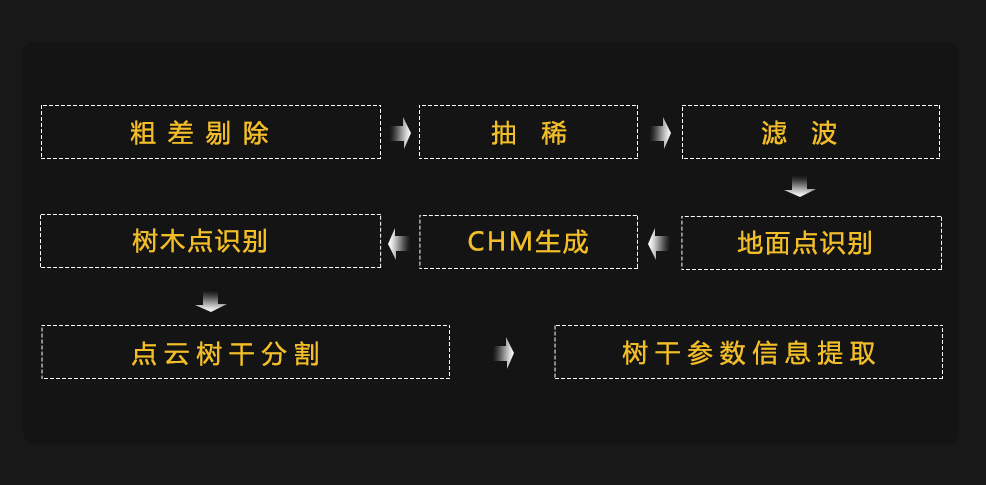
處理(lǐ)流程
樣地一:
原始點數總量:88864990,平均點密度:18811.4點/平方米,
樹種:側柏
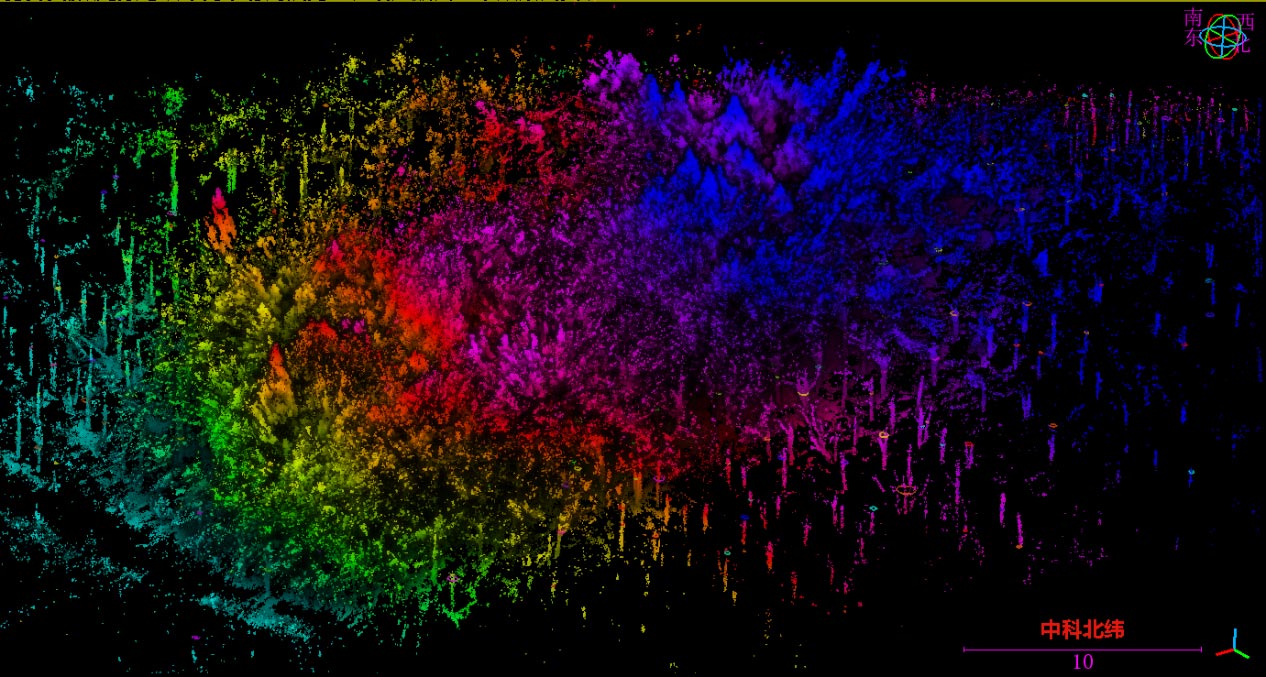
原始點雲
由于地基激光雷達掃描時存在大量的重複點,大量的點雲冗餘,增加了數據量,處理(lǐ)時間較長(cháng)。因此對原始點雲進行抽稀。
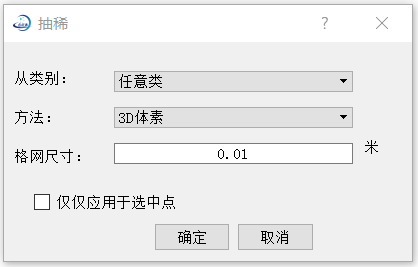
依據3D體(tǐ)素,格網尺寸0.01m抽稀後點雲數量:23543618;點密度4983.83點/平方米。
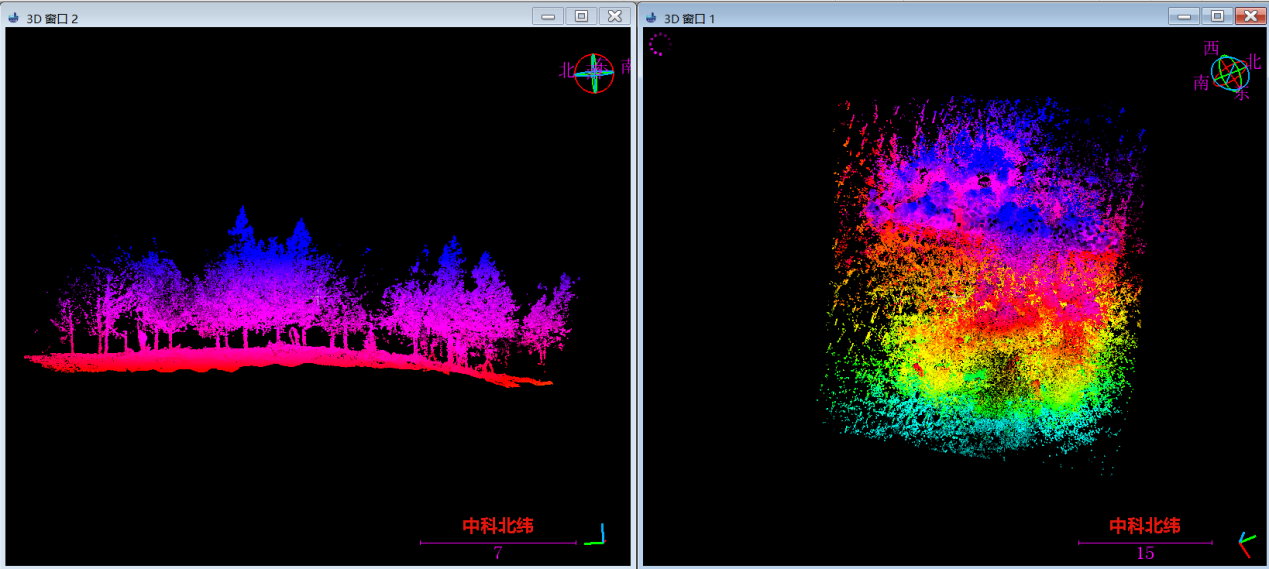
點雲剖面
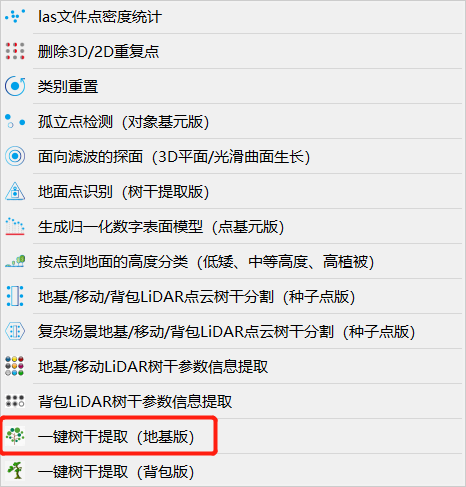
一鍵式地基點雲樹幹提取:
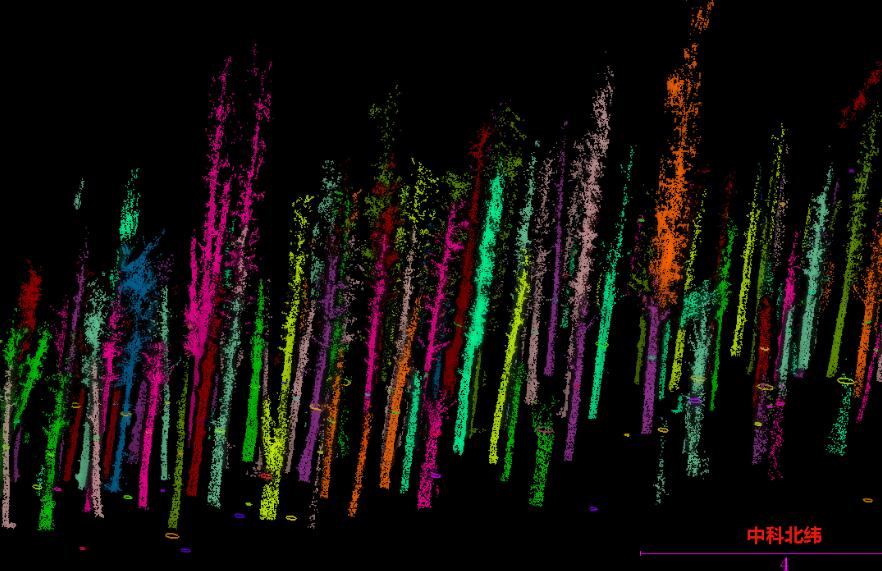
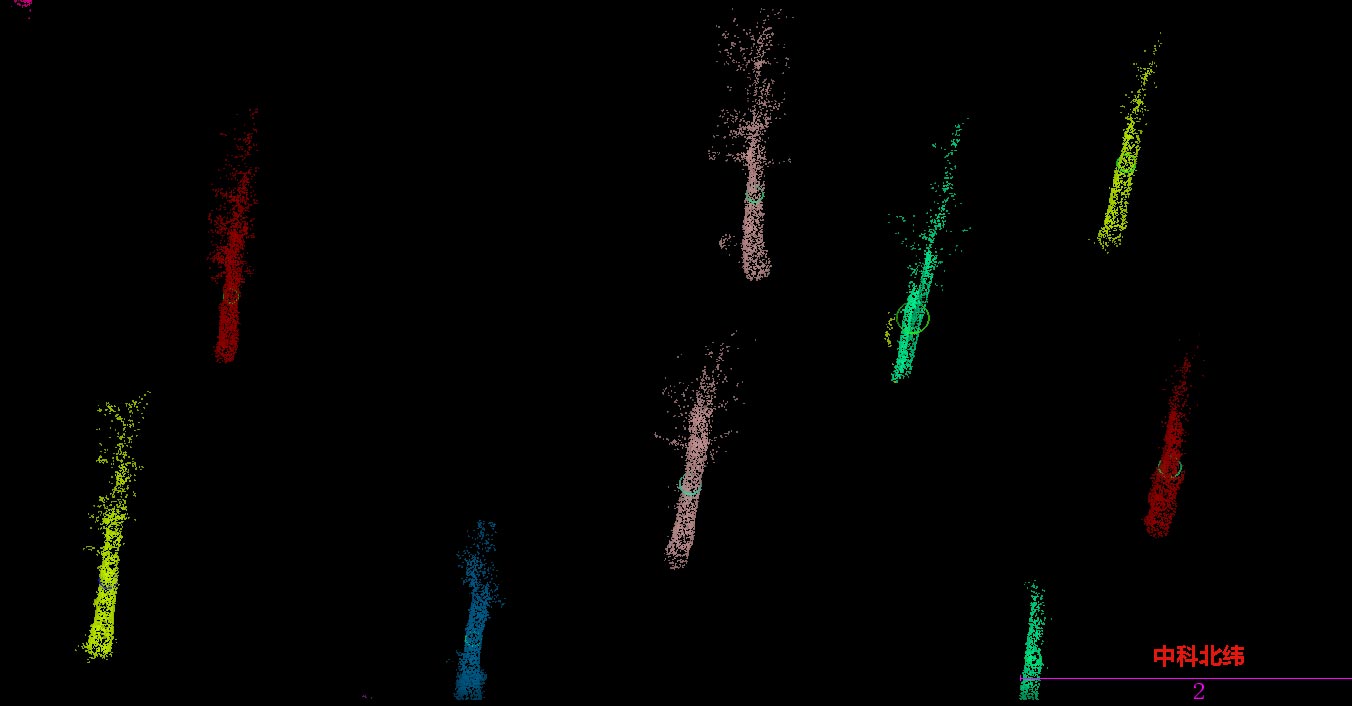
提取的單株樹幹與胸徑疊加
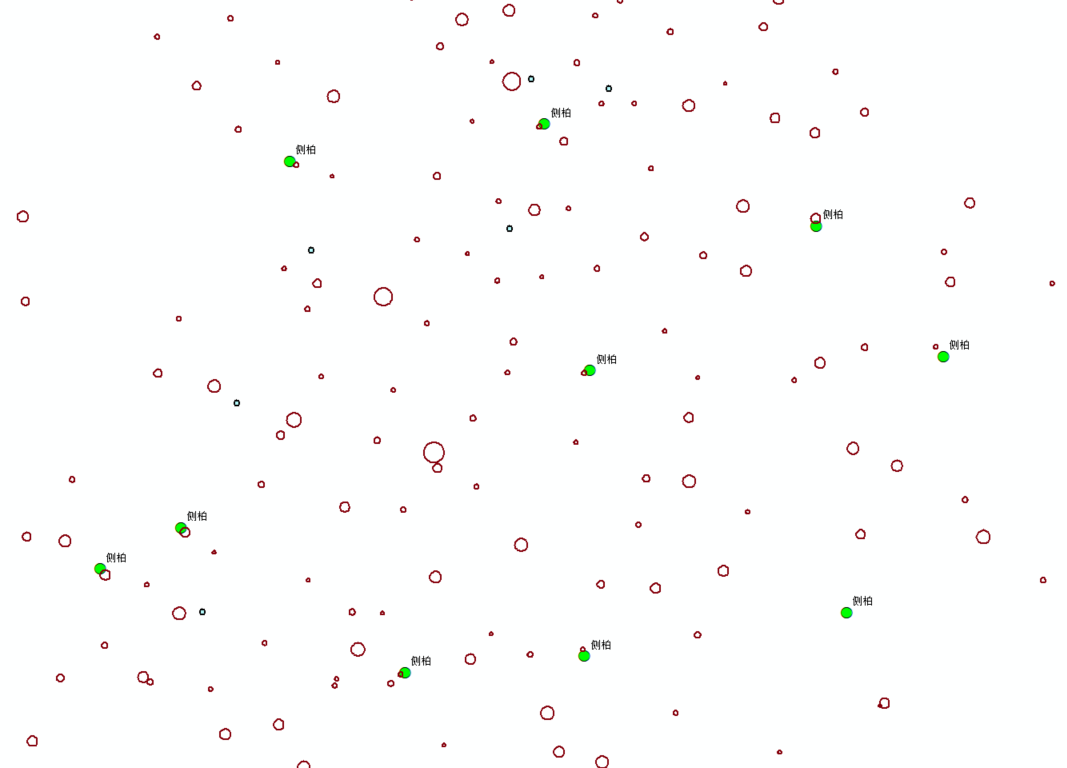
和外業采集點實際對比的情況
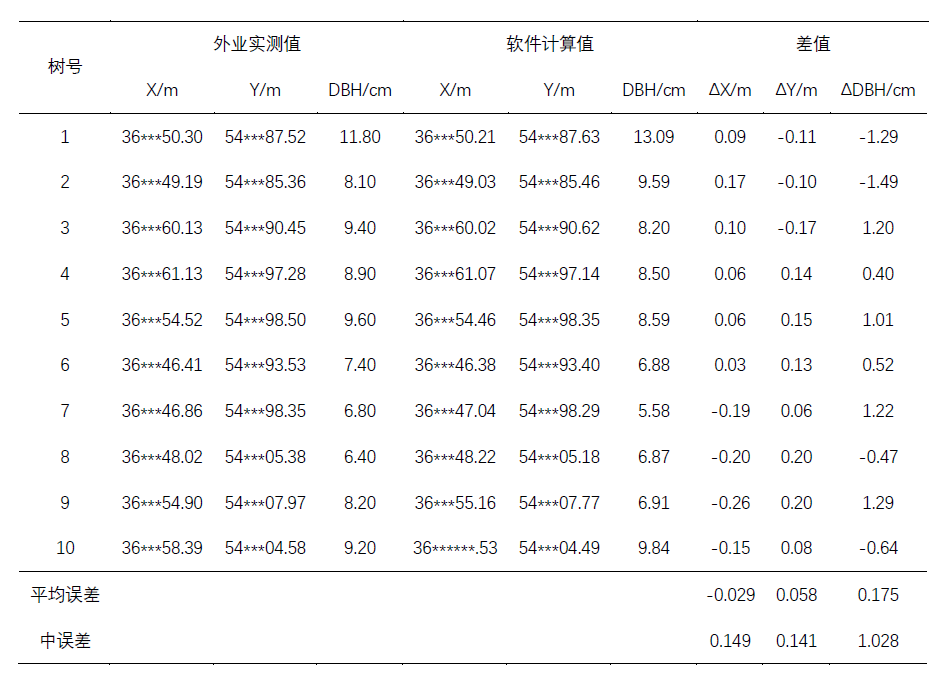
樣地一自動提取林木(mù)參數與外業實際采集林木(mù)參數對比
樣地二:
樹種:楊樹
原始點數量:59562487,點密度:5674.78
按照0.01m抽稀後點數:22456013 點密度:2139.48
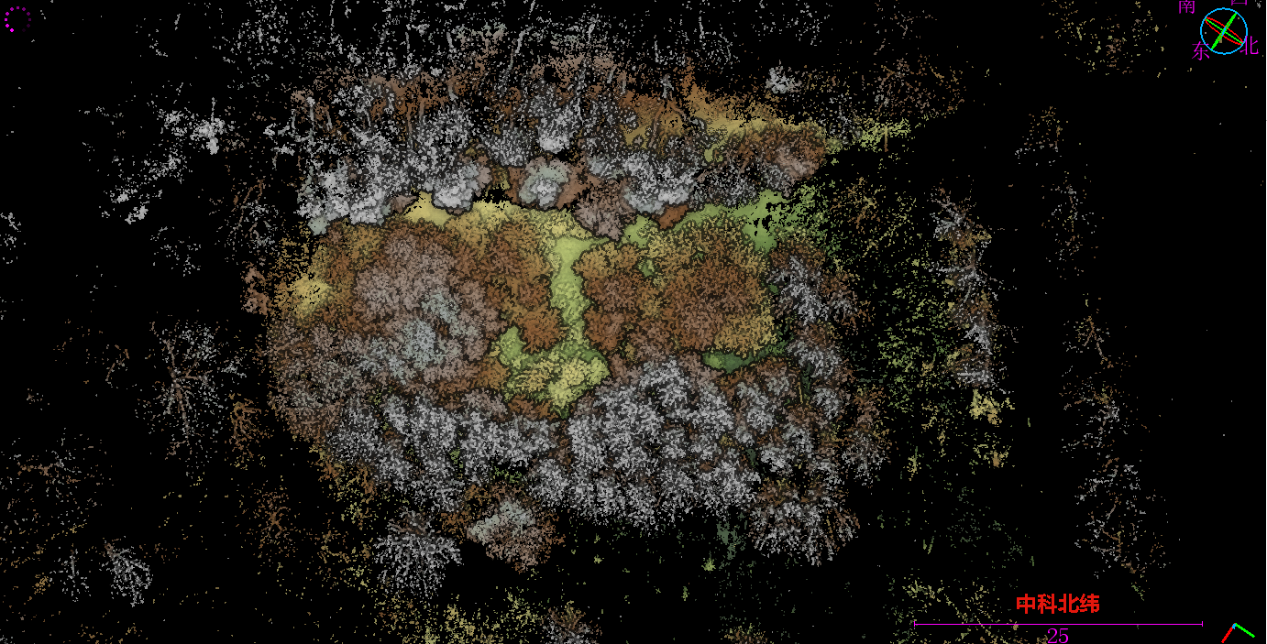
原始點雲
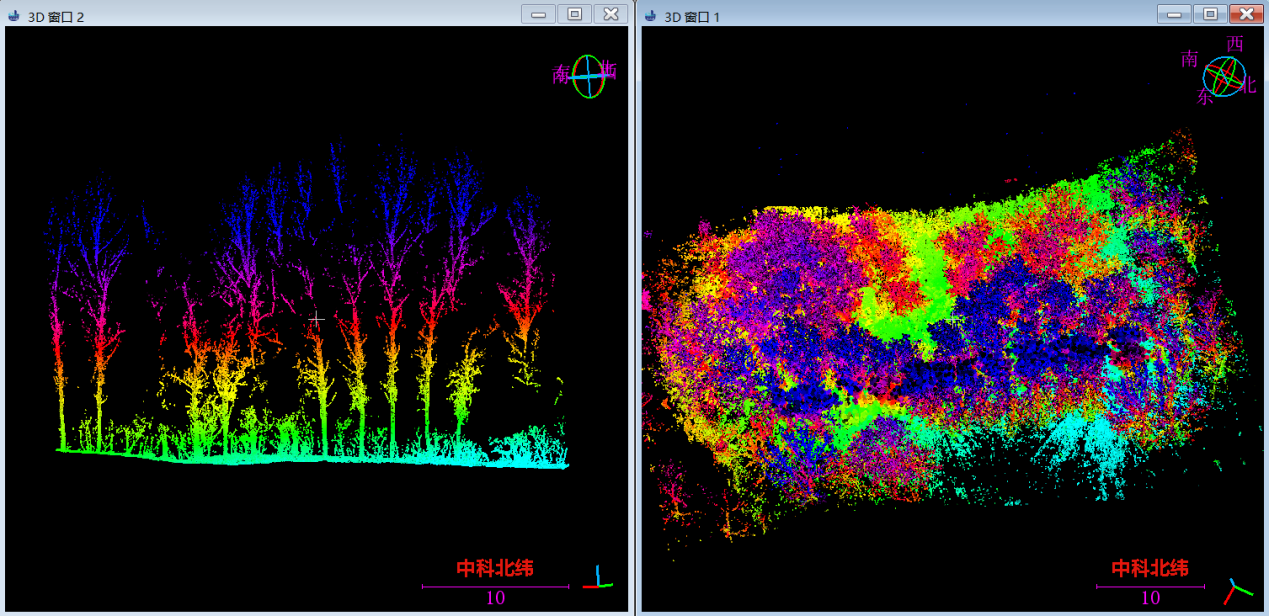
點雲剖面

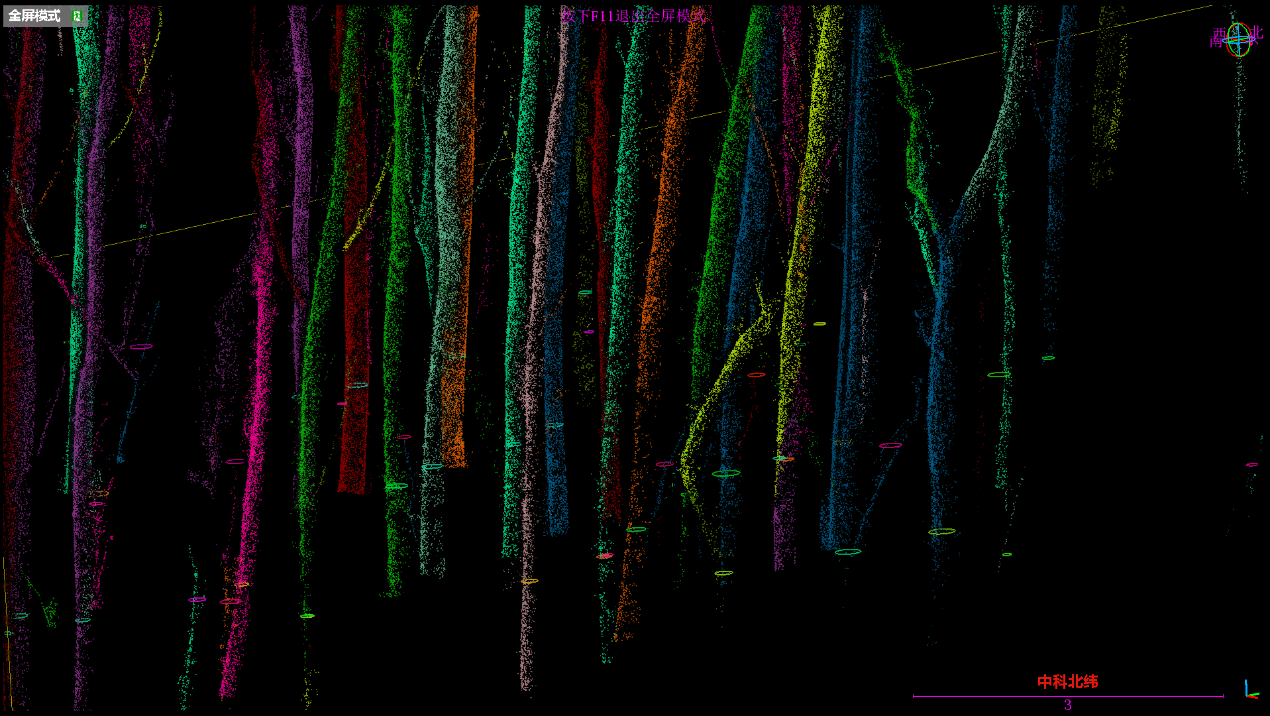
提取單株樹幹與胸徑的效果
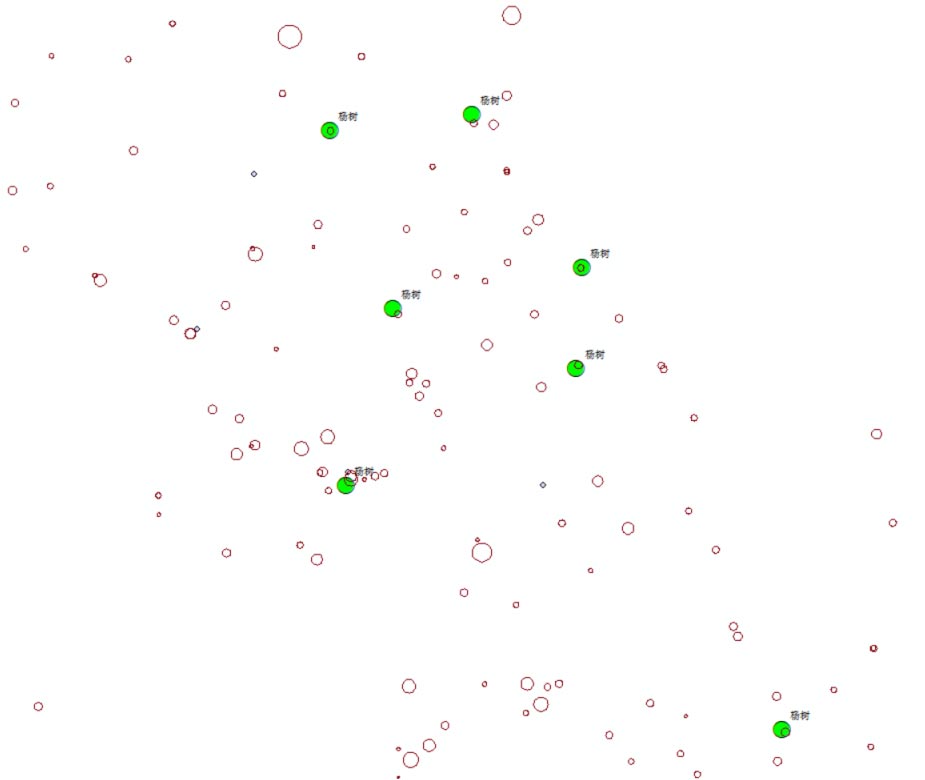
和外業采集點實際對比的情況
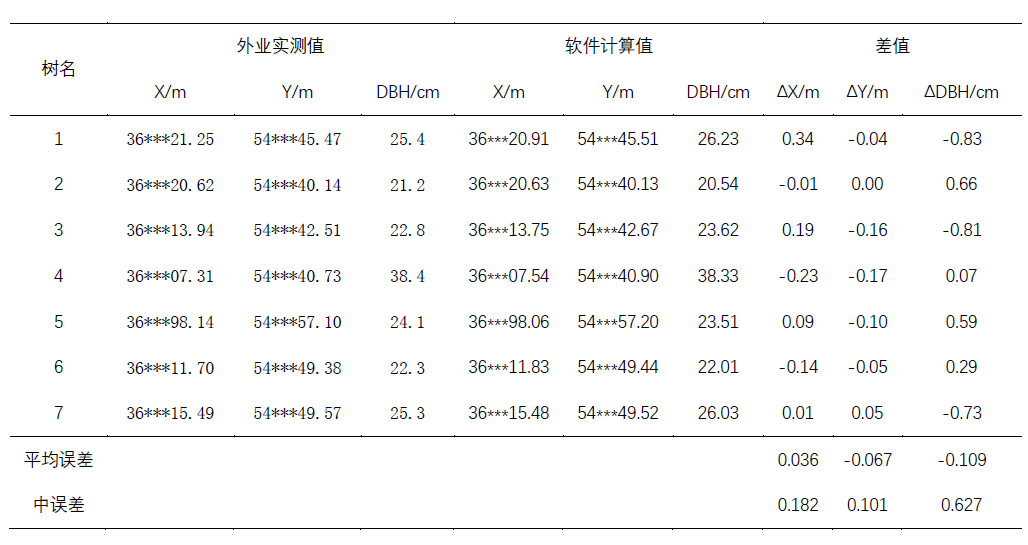
樣地二自動提取林木(mù)參數與外業實際采集林木(mù)參數對比
綜合對比分(fēn)析得到:
自動化程度:
人工(gōng)測量自動化程度最低,還需要大量紙質(zhì)信息的電(diàn)子化錄入,并得不到林木(mù)立體(tǐ)信息;
架站式激光雷達系統采用(yòng)激光雷達後處理(lǐ)軟件銀河點點通,自動化程度極高,直接對點雲數據進行操作(zuò),無需栅格化處理(lǐ),生成歸一化數字表面模型,最終對點雲樹幹分(fēn)割和樹幹參數信息全部實現自動化的處理(lǐ),得到了樹木(mù)胸徑及樹幹形态。
簡單易用(yòng)。面向單木(mù)分(fēn)割和參數提取的激光雷達點雲數據處理(lǐ)和分(fēn)析的過程中(zhōng),盡管涉及的9個步驟需要少量的參數輸入,但這些參數的取值均有(yǒu)明确的物(wù)理(lǐ)含義、而且這些參數與點雲的密度、精(jīng)度、場景的林木(mù)基本情況等先驗知識有(yǒu)關,易于操作(zuò)人員使用(yòng)。
精(jīng)度對比:
胸徑不考慮人為(wèi)測量誤差等因素,默認人工(gōng)測量的數據精(jīng)度值最可(kě)靠。對比得到,架站式掃描儀與人工(gōng)實測相比,樣地一(側柏)平均誤差為(wèi)0.175cm,中(zhōng)誤差為(wèi)1.028cm;樣地二(楊樹)平均誤差為(wèi)-0.109cm,中(zhōng)誤差為(wèi)0.627cm;
位置信息,由于人工(gōng)無法采集樹木(mù)中(zhōng)心的位置,而軟件提取的為(wèi)樹木(mù)中(zhōng)心位置的坐(zuò)标。忽略這個的影響,基本可(kě)以達到精(jīng)度要求。
綜上,使用(yòng)地基激光雷達掃描儀結合銀河點點通軟件,可(kě)獲取林區(qū)單木(mù)的準确胸徑和樹高信息,可(kě)以二元材積方程更精(jīng)确的預估林木(mù)蓄積量。背包激光雷達和機載激光雷達數據,由于其數據獲取效率更高,結合點點通軟件對單木(mù)胸徑、樹高的拟合和反演,在實際大規模項目執行時,更具(jù)意義。歡迎業界同仁以更多(duō)實際項目試用(yòng)和予以驗證。
樹幹分(fēn)割效果展示
