








































![CCTV-17農業農村 | [中(zhōng)國(guó)三農報道]中(zhōng)國(guó)科(kē)學(xué)院植被病蟲害遙感監測與預測系統升級版發布](static/picture/630c32e37f65b.png)


































機載激光雷達獲取的數據以大量的空間點為(wèi)主,俗稱點雲。機載LiDAR點雲密度用(yòng)于描述單位面積上激光雷達點的平均數量,定義為(wèi)以高程方向為(wèi)法向方向、單位面積上激光雷達點的平均數量,它反映了激光雷達腳點空間分(fēn)布的特點及密集程度。密度作(zuò)為(wèi)點雲數據的重要屬性,是分(fēn)辨地物(wù)細微程度的一種度量,越高的點雲密度就能(néng)探測越微小(xiǎo)目标,也就能(néng)夠更精(jīng)确地描述地形地物(wù)的特征和規律。點雲密度作(zuò)為(wèi)評價數據質(zhì)量的重要指标,反映着數據用(yòng)于生産(chǎn)應用(yòng)的能(néng)力。并且,點雲密度作(zuò)為(wèi)點雲數據處理(lǐ)算法的運算前提,影響着數據處理(lǐ)的精(jīng)度和效率。可(kě)以說,點雲密度貫穿着整個機載激光雷達的數據設計、處理(lǐ)、應用(yòng)的生命周期。
點雲密度作(zuò)為(wèi)激光雷達技(jì )術的關鍵指标,其重要性歸納如下:
點雲密度是成果提交時必要的質(zhì)檢項,是項目成果的主要指标之一;
點雲密度是航線(xiàn)規劃、激光雷達作(zuò)業參數設置需考慮的主要指标之一;
點雲密度是分(fēn)辨地形地物(wù)特征細微程度的度量,是點雲質(zhì)量的重要評價指标之一;
點雲密度是激光雷達硬件性能(néng)的主要指标之一;
點雲密度是點雲數據後處理(lǐ)軟件各步驟算法的重要參量,參量的設置和優化決定了最終的處理(lǐ)效果;
點雲密度與項目成本密切相關。
近幾年,随着激光雷達技(jì )術的普及和多(duō)行業應用(yòng)的延展,引導了無人機LiDAR硬件系統的快速叠代和大量新(xīn)品的上市,外業獲取的點雲精(jīng)度越來越高、密度越來越大,甚至單架次、單航帶的機載LiDAR的點雲密度優于1000個點/平方米、與部分(fēn)車(chē)載LiDAR點雲密度水平相當,着實讓人驚奇和興奮。雖然高密度的無人機LiDAR點雲已經成為(wèi)目前一種主流空間數據類型,但由于後處理(lǐ)軟件相對于硬件系統升級的滞後性,使得高密度點雲應用(yòng)還不成熟。
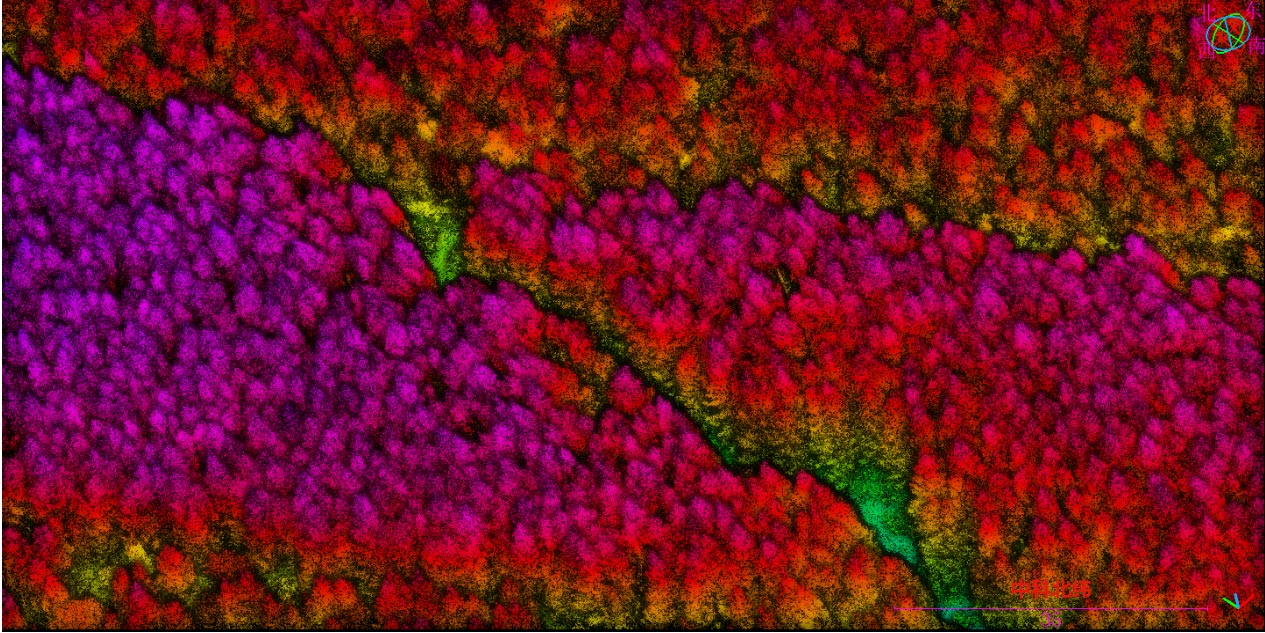
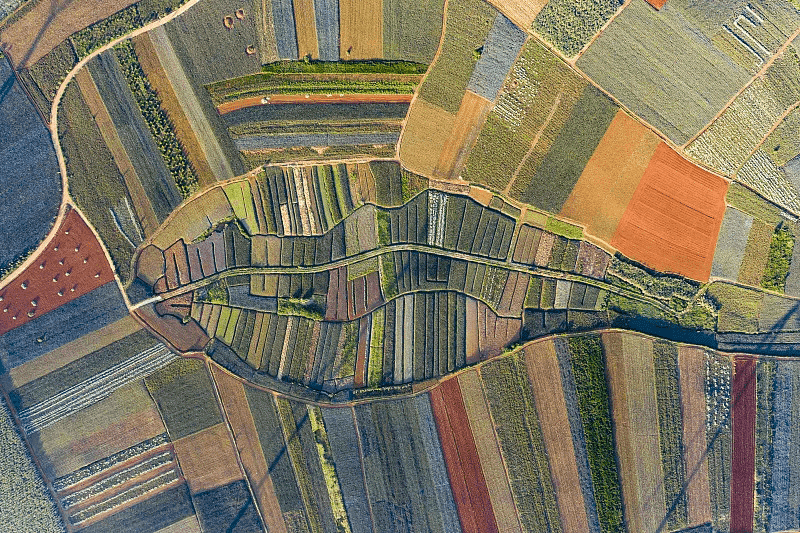
圖1 某林地的高密度機載LiDAR點雲數據
(點雲密度為(wèi)750 pt/m²)
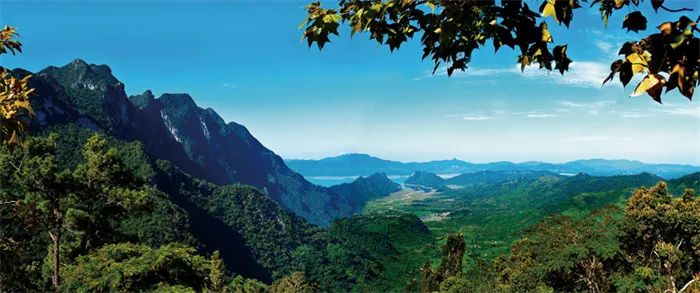
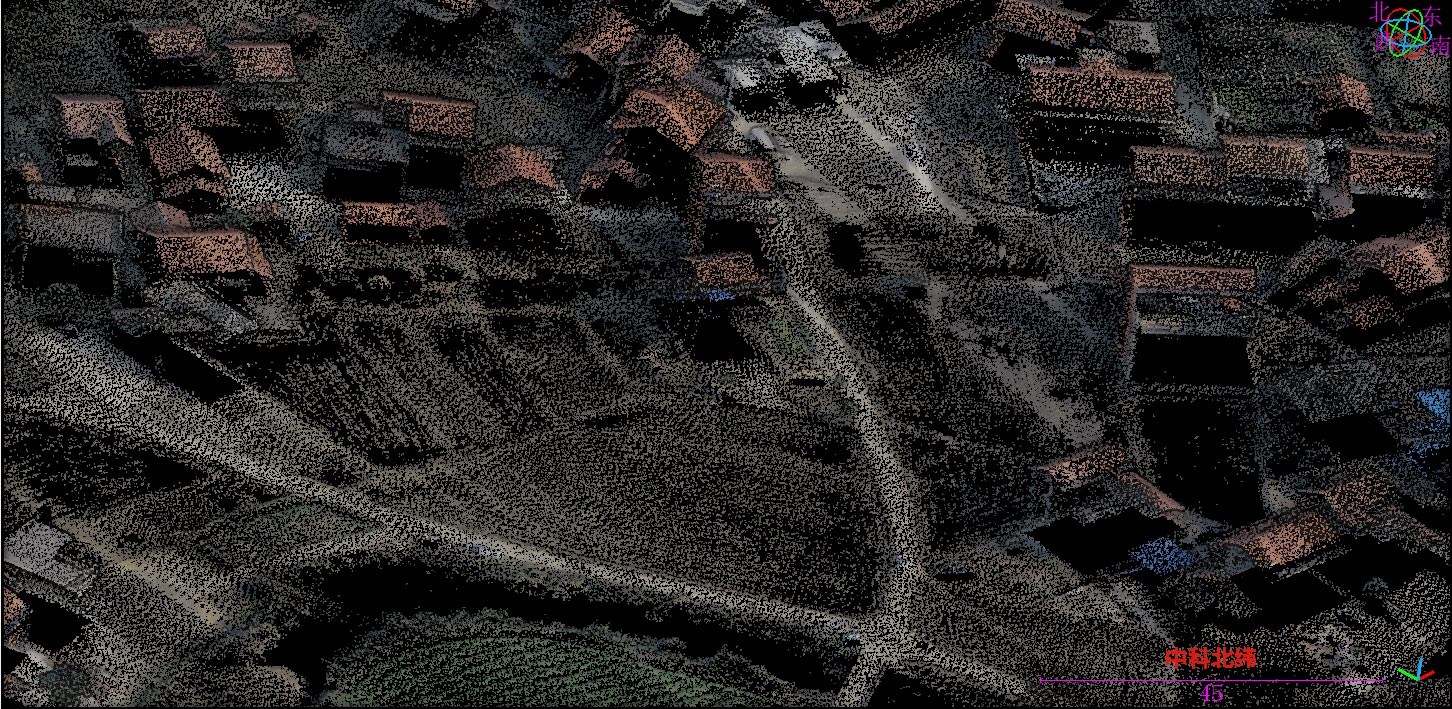
下圖展示的是海達數雲PM-1500在同一區(qū)域,以不同高度獲取的三種不同密度的機載LiDAR點雲數據,設備同時搭載有(yǒu)航測相機,點雲經過影像着色處理(lǐ)。
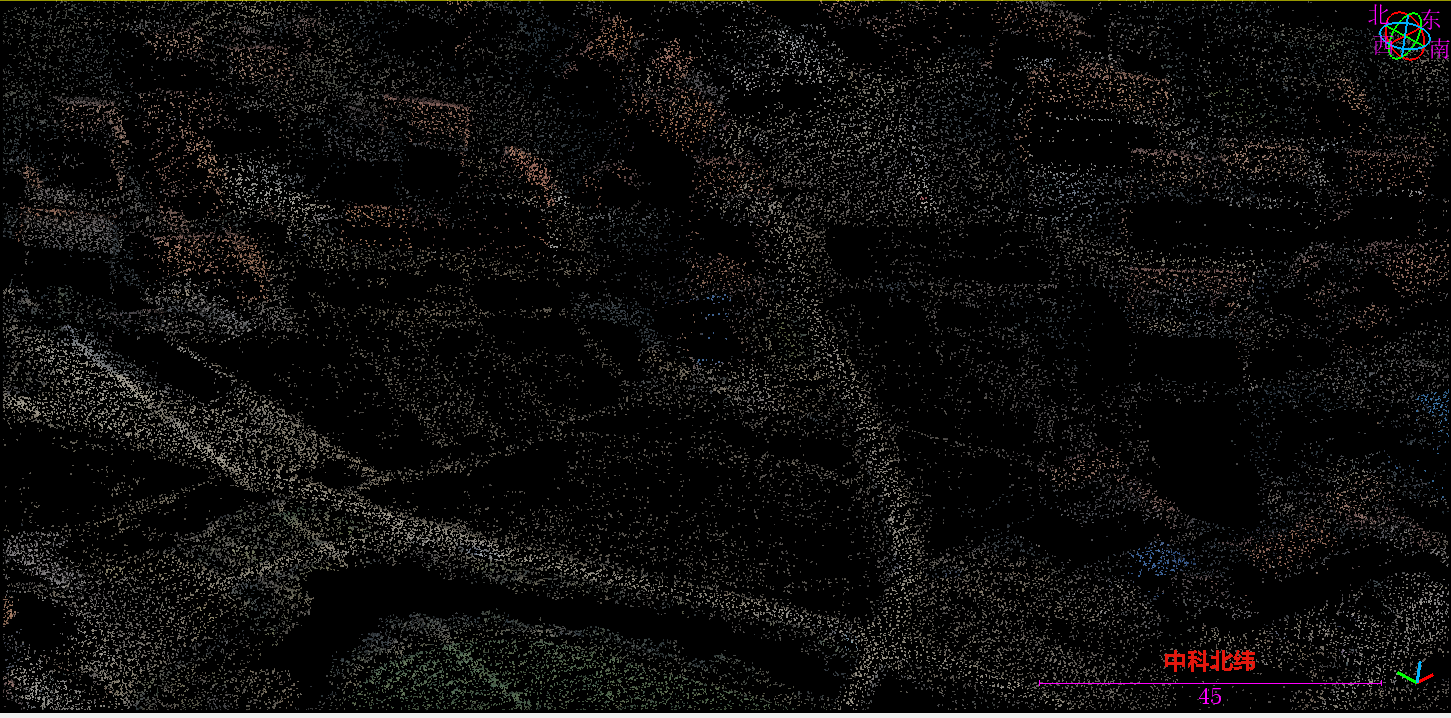
(a) 航高700m、點密度為(wèi)5 pt/m²
(b) 航高400m、點密度為(wèi)19 pt/m²

(c) 航高300m、點密度為(wèi)105 pt/m²
圖2 PM-1500獲取的機載LiDAR點雲
以上三圖的點雲密度逐漸升高,由此可(kě)見,越高的點雲密度能(néng)探測越微小(xiǎo)目标,也能(néng)夠更精(jīng)确地描述地形地物(wù)的特征和規律。
點雲密度作(zuò)為(wèi)點雲數據後處理(lǐ)軟件必須考慮的因素。然而,目前多(duō)數的點雲後處理(lǐ)軟件涉及的很(hěn)多(duō)算法和工(gōng)具(jù)并沒有(yǒu)考慮密度因素,并不具(jù)備完全的通用(yòng)性。多(duō)數軟件對于中(zhōng)低密度點雲可(kě)獲得較好的成果,但用(yòng)于高密度點雲處理(lǐ)時,往往存在軟件易崩潰、處理(lǐ)進程停止或者處理(lǐ)效果不佳的現象。需要對比和探索多(duō)種軟件才能(néng)獲取最佳的點雲數據處理(lǐ)方案。對此,銀河點點通軟件基于十餘年科(kē)研成果的轉化,算法積累和打磨,我們從數據處理(lǐ)端,針對高密度點雲數據處理(lǐ)給出“錦囊妙計”。
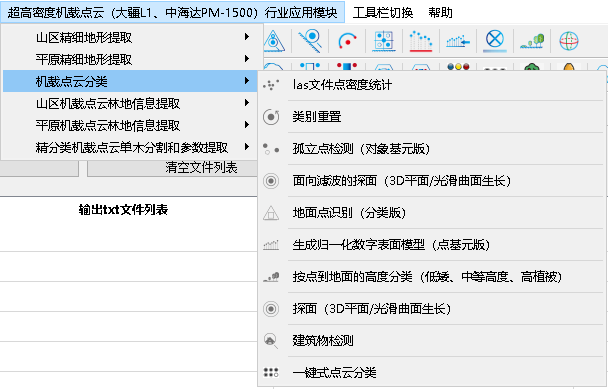
銀河點點通基于創新(xīn)性的面向對象的點雲分(fēn)析理(lǐ)論,形成一套完整的從“點雲→配準→點雲分(fēn)割→語義标注→單體(tǐ)化→3D建模→統計分(fēn)析”的點雲處理(lǐ)和分(fēn)析技(jì )術流程。針對當前高密度點雲難以處理(lǐ)的現狀,銀河點點通開發出高密度點雲模塊,為(wèi)高密度機載點雲濾波、分(fēn)類和單木(mù)分(fēn)割提供一站式的解決方案。
銀河點點通基于創新(xīn)性的面向對象的點雲分(fēn)析理(lǐ)論,形成一套完整的從“點雲→配準→點雲分(fēn)割→語義标注→單體(tǐ)化→3D建模→統計分(fēn)析”的點雲處理(lǐ)和分(fēn)析技(jì )術流程。針對當前高密度點雲難以處理(lǐ)的現狀,銀河點點通開發出高密度點雲模塊,為(wèi)高密度機載點雲濾波、分(fēn)類和單木(mù)分(fēn)割提供一站式的解決方案。
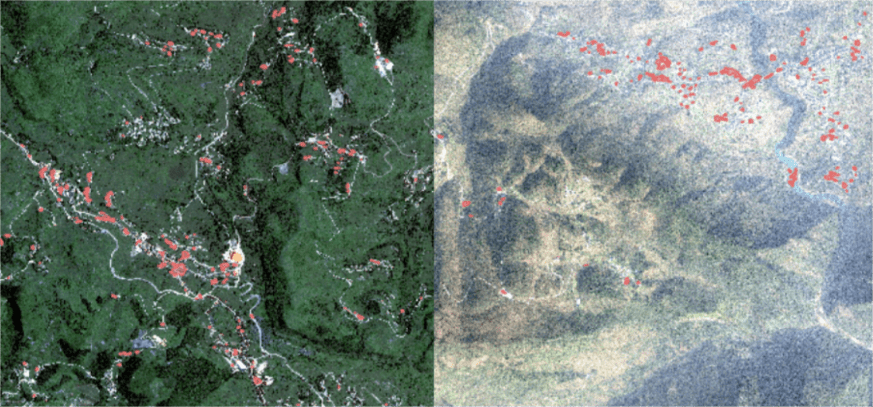
圖3 高密度一鍵式點雲分(fēn)類功能(néng)
關于軟件功能(néng)的具(jù)體(tǐ)應用(yòng)将在後面系列中(zhōng)為(wèi)大家一一分(fēn)享。
綜上所述,随着激光雷達設備硬件制造技(jì )術的提升,項目質(zhì)量要求向着高精(jīng)度、高精(jīng)細化、高分(fēn)辨率的發展,激光雷達技(jì )術應用(yòng)方向的拓展,都展示出了高密度的無人機LiDAR點雲已逐漸成為(wèi)點雲發展的大趨勢之一,計算機基礎硬件設備的升級也為(wèi)大數據量的承載提供了可(kě)能(néng)。銀河點點通願在點雲的後處理(lǐ)階段為(wèi)這一趨勢助力,為(wèi)行業的技(jì )術升級貢獻一絲力量,為(wèi)用(yòng)戶的行業應用(yòng)提供更多(duō)可(kě)能(néng)。